|
Analysis and Design of Cognitive Radio Networks Using Game Theory | ||
While WiFi coverage has become less of a problem, external network interference has emerged as a significant problem as the networks fight for access to a limited number of channels (and frequently, the same channel!). In theory, this interference problem could be ameliorated by applying a frequency reuse pattern to the networks – a seemingly easily implemented approach as 802.11b has three nonoverlapping channels (1, 6, and 11) and 802.11a has eight minimally interfering channels in the US (nineteen in Europe) which are explicitly intended to facilitate frequency reuse in a minimally interfering manner. However, most people never modify their access points from the factory settings so many access points operate on the same pre-set channel.
When designing multi-channel networks, we would prefer to construct self-tuning networks wherein the networks autonomously choose their parameters post-deployment indicating an opportunity for one of the killer applications of cognitive radio– automated radio resource management for automated deployment.
General Model for DFS
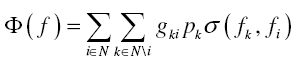
we can model a network of cognitive radios (or any goal-driven adaptive radios) by the tuple <N, F, {ui}, {di}, T> where N represents the set of n cognitive radios, F is the frequency space formed as F= F1×...×Fn where Fi specifies the frequencies available to cognitive radio i, {ui}, ui : F-->R, is the set of goals that inform the cognitive radios’ decision processes, di : F-->Fi, which are implemented at the decision timings contained in T. we model the goal of the radios as minimizing perceived interference as shown in :
 |
where |
fi is the frequency of cognitive radio i's RTS/CTS signal, B is the signal bandwidth, pk is the transmission power of radio k’s waveform, and gki is the link gain from the transmission source of radio k’s signal to the point where radio i measures its interference. It is assumed that the network design objective function is to minimize the sum network interference, as shown below.
 |
Some DFS methods
[Villegas_05] considers a distributed graph coloring algorithm where edges are formed between interfering access points. Each access node recursively distributes frequency and interference measurements and selects the frequency it believes will result in the least interference.
[Luo_04] considers a closely related algorithm applied to a regular 10x10 grid of access points where each radio is guided by:
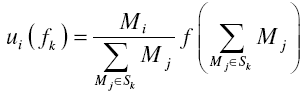 |
where Mi is the number of users attached to access node i, Sk is the set of nodes operating on fk and f evaluates the throughput for the number of users in the argument. Each access node then chooses the channel that maximizes its throughput and switches to it with a fixed probability, p.
Frequency Selection Adaptive Interference Avoidance
Consider an ad-hoc network of cognitive radio links operating in master-slave fashion.
Each link, j, is implementing a waveform with bandwidth B and center frequency fj. The
master node on each link j directs the link to adjust fj so that the interference that link j is
minimized. To simplify this example, we’ll assume all links are transmitting at a fixed
power level and there is symmetric path loss between links.
A single iteration of this game can be expressed as a normal form game as follows The
player set is the set of links, N. Each player’s action set is the set of frequencies, F,
available to that link. A utility function for any player, j, is given by
 |
This game is an exact potential game with a potential function given by :
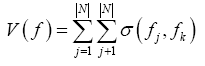 |
Thus this network is assured of having a steady-state which can be identified by solving
for the maximizers of V(a), is assured of converging assuming each link acts in its own
interests and the link allowed to adapt at any particular time is chosen randomly, and is
stable.
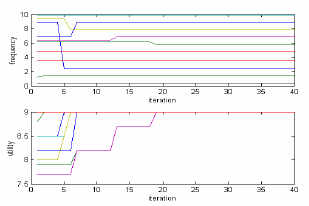
Shown below in Figure 7.1 is the output of a simulation of this system where there are 10
links, B = 1 MHz, F =[1 10]MHz, and each master node chooses the frequency that
maximizes its utility. Figure 7.2 shows another realization of this simulation. Note that
while the existence of a steady state, convergence to a steady state, and stability of any
steady-state is assured by virtue of being a potential game, there are actually numerous
steady-states in this network, not all of which achieve the optimal channel spacing. Also
note that since there are numerous fixed points, no fixed point is globally stable.
 |
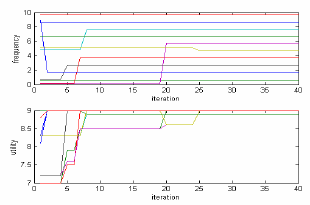 |
Figure 7.1 :Frequency Selection |
Figure 7.2 : Frequency Selection |